 Tweet
Tweet
Hi,
I've been having some issues with pitch and roll angle values. The values frequently become greater than the default 0 and 1 (as set up in the scalings). I suspect that this may be happening because I have turned off smoothing of the accels and MotionPlus.
After recording for about 5 minutes, the values will acquire very large magnitudes (in either the positive or negative direction) and then become reported as nan in the log shortly thereafter. The quick look graph also ceases to function. Even after this happens, the pitch and roll velocities look mostly ok, except that they occasionally go above 1 or below -1.
This screenshot illustrates the problem:

And this screenshot shows my routings:
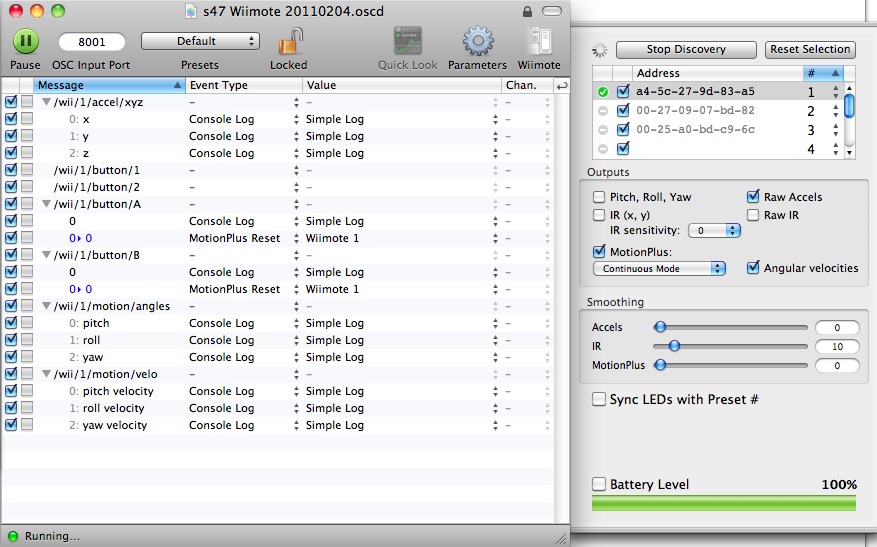
Is this happening because of runaway compounding of erroneous acceleration/velocity values? Maybe this is irrelevant, but I'm using a Wiimote+.
Thanks,
Alfred
I've been having some issues with pitch and roll angle values. The values frequently become greater than the default 0 and 1 (as set up in the scalings). I suspect that this may be happening because I have turned off smoothing of the accels and MotionPlus.
After recording for about 5 minutes, the values will acquire very large magnitudes (in either the positive or negative direction) and then become reported as nan in the log shortly thereafter. The quick look graph also ceases to function. Even after this happens, the pitch and roll velocities look mostly ok, except that they occasionally go above 1 or below -1.
This screenshot illustrates the problem:
And this screenshot shows my routings:
Is this happening because of runaway compounding of erroneous acceleration/velocity values? Maybe this is irrelevant, but I'm using a Wiimote+.
Thanks,
Alfred
Comment